随着全球对海上风能投资的不断增加以及风电技术在深水危险环境中的快速部署,风电机组及其相关基础设施的在役检测对风电场的安全高效运行具有重要作用,使得近年来使用无人机对风能基础设施进行远程和近程的检查受到了广泛关注。

图片来源 : shutterstock、达志影像
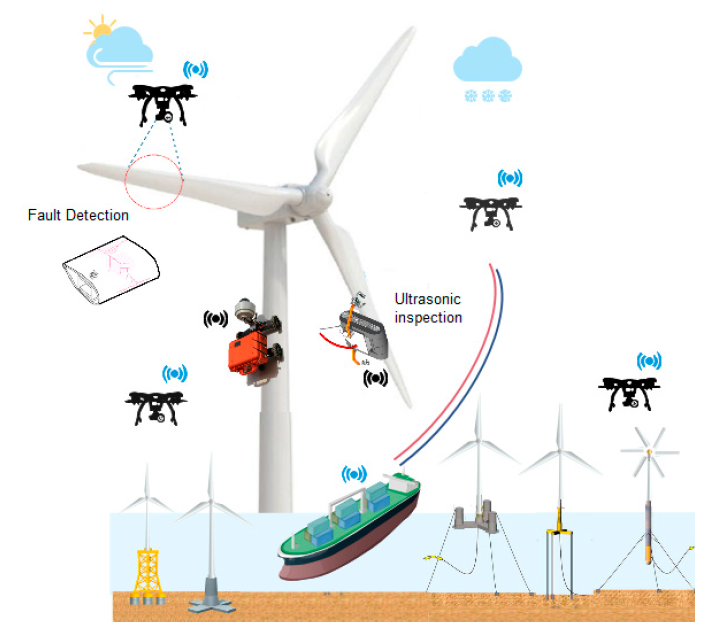
图1显示无人机能够在空中悬停并从不同位置和角度拍摄风力涡轮机部件的高画质影像[1],透过计算机分析这些影像能够识别风力涡轮机缺陷或损坏的早期迹象,以利采取适当的维护措施和预防故障发生,不仅可以减少人员前往和爬上风力涡轮机的次数,还可以减少执行危险检查工作所需的重型起重设备的数量,并能缩短检测缺陷和从整个系统收集诊断讯息所需的停机时间。
除此之外,像是风电行业看不见的制程设施破损死角,以无人机进行陆域和海域之风机叶片的自动巡检,能够很好地的代替人工进行检测,藉此提高设施安全管控及风险辨识的能力。本文就风力发电设备的风机叶片(wind turbine blades)以无人机执行近距离智能巡检,探讨风电行业因此受惠的情况。
图1:无人机海上风电巡检示意图
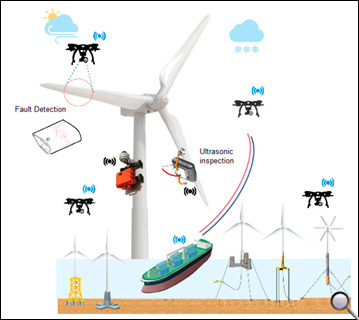
图片来源:Robotics (2021)
叶片检查是离岸风电运维的关键项目
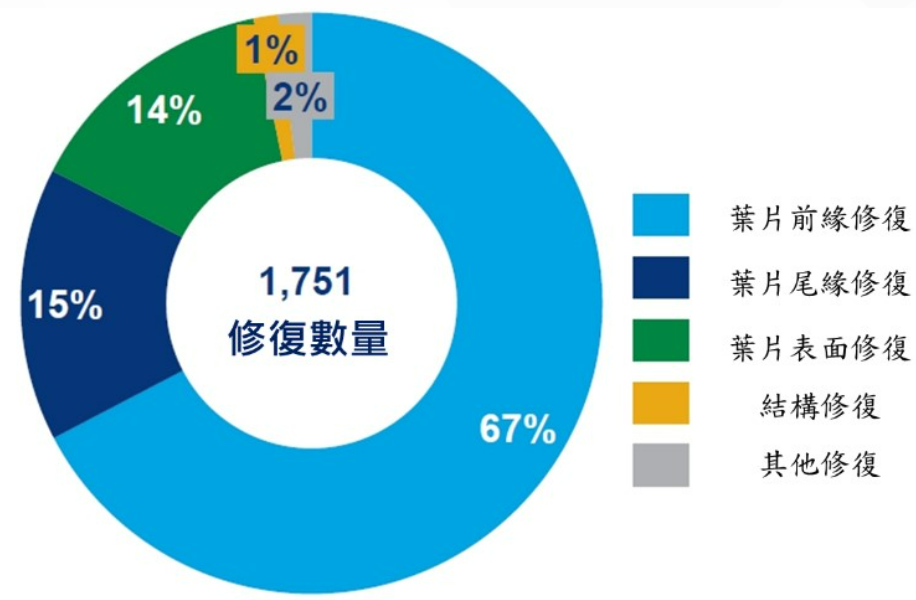
根据2019 Wood Mackenzie离岸风电运转维护趋势报告,叶片可用的最佳系统寿命仅约5年左右,叶片侵蚀与修复是离岸风电运维的最大挑战;光是2018年间叶片修复总数量约1,751支,已造成全球离岸风机累计停机时间超过5,000天,其中又以叶片前缘损坏修复占比67%最高,其次是叶片尾缘修复、叶片表面修复及叶片结构修复,占比分别为15%、14%以及1%(如图2)。
图2:离岸风机叶片修复数量占比图(2018年间)
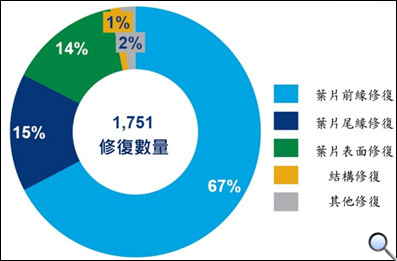
图片来源:Wood Mackenzie (2019)/金属中心MII- ITIS研究团队(2019/11)
风力发电机(又称风力涡轮机,简称风机)是一种将气流的动能转为机械能的装置,通常会接上发电机并透过风力带动叶片(大多采用3叶片驱动)旋转,促使发电机发电。因此,叶片是风力发电机组中一个非常关键的部件,它的气动效率决定了风力发电机组利用风能的能力。叶片不仅要有最佳的机械性能和疲劳强度,还要具有耐腐蚀、紫外线照射和防雷击等性能。叶片高速转动时不可避免会与空气中的沙尘、颗粒产生摩擦和撞击,导致叶片前缘磨碎或开裂。另外,随着风机运行年限的增加,叶片表面胶衣(gel coat)磨损、脱落后会出现砂眼和裂纹,砂眼会造成叶片阻力增加影响发电量。
以往,在检查风力发电设备的风机叶片(wind turbine blades)有无损伤时,通常是在叶片旋转停止的状态下,使用悬挂绳索或吊篮工人移动到叶片所在位置进行目视检查和锤击检查,或者采用望远镜、地面高倍率相机等人工方式进行风机叶片巡检,耗费大量劳力和时间。若能透过无人机进行自动巡检代替人工检测,时效必定提高。近来已有使用无人机检查风力发电设备,但多涉及风力发电设备紧急停止状态下,对静止或轻微旋转之叶片的各个部分进行拍摄,以获得检查图像[2]。绿能科技中之风力发电机(风机)已有无人机智能巡检这方面的实务应用并申请专利。
导入AI实现风机叶片智能巡检
为使能在叶片正常运转状态下进行损伤检查作业,韩国专利号KR102142540B1揭示一种基于机器学习和无人机的风力涡轮机复合材料叶片损伤的检测方法[3],该方法透过对每个损伤模型进行模态分析,获取并存储每种损伤的固有频率数据;生成多个训练数据,其中定义了固有频率数据和损伤类型之间的相关性,然后使用每个训练调制解调器器学习神经网络;透过配备有雷射或位移测量装置的无人机利用图像获取正在运行之叶片的振动数据;并将振动数据转化为频率数据输入神经网络,透过神经网络获取并输出损伤类型的检测讯息。该检测方法能够透过无人机检测叶片的当前状态,反映实际的结构特征和各种损伤类型,不仅能在叶片运转的同时进行损伤检查作业,显著提高损伤试验作业的客观性和可靠性,也透过基于神经网络学习和测试每种损伤类型的固有频率,进行更快速和准确的损伤测试操作。
结合计算机视觉和光达技术 力上加力
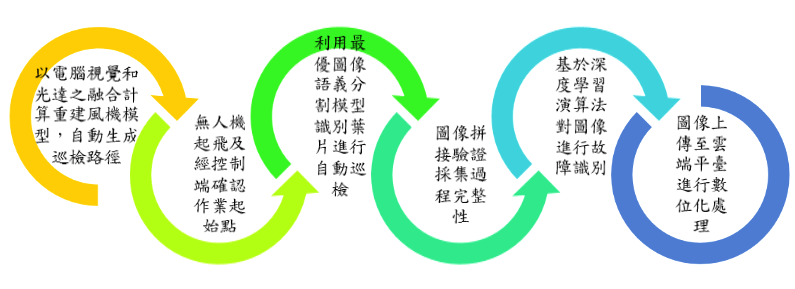
例如在中国有业者发明一种全自动风力发电机组叶片智慧巡视及诊断分析方法[4],该方法包括:无人机利用计算机视觉和光达(Lidar,英文全名为Light Detection And Ranging)之融合计算重建风机模型,并自动生成巡检路径;无人机起飞经控制端确认作业起始点并沿巡检路径飞行,利用最优图像语义分割模型识别叶片进行自动巡检;无人机根据巡检路径依次巡检风机三个叶片完整采集全部叶片的图像;无人机将采集的同一条路径下叶片前景图像进行拼接验证其采集的完整性;基于深度学习算法对图像进行故障识别,并对故障图像进行类别和严重程度的评定,图像上传至云端平台,进行分类存储,对图像进行数字化处理。这种结合计算机视觉、深度学习和图像语义分割等技术,实现无人机对叶片全自动巡检和故障诊断的方法流程如图3所示。
图3:无人机对叶片全自动巡检流程
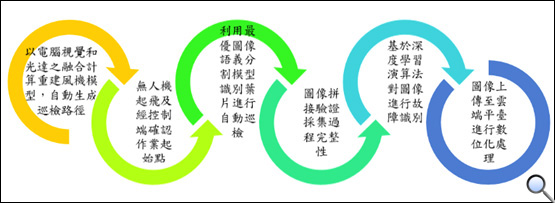
图片来源:作者自行绘制
导入RTK高精度定位、仅厘米级定位误差(近距离巡检)
无人机应用于风机故障巡检已成为一大热点,为避免无人机巡检时撞上叶片的风险,近距离巡检对于定位精度的要求颇高,为满足高精准定位需求的应用,近来已有业者将RTK(Real- time kinematic)高精度定位技术导入无人机风机叶片自主避障巡检的方法[5],所采用的定位是RTK定位技术。RTK是Real- time kinematic的缩写,称为实时动态技术[6],用于校正当前全球导航卫星系统(Global Navigation Satellite System, GNSS[7])中的定位误差并将误差缩减到厘米级[8]。以GNSS系统中美国的GPS(全球定位系统Global Positioning System,简称GPS)为例,RTK就是一种GPS校正技术,可在无人机从现场测量和捕获图像时对位置数据进行实时校正。与现有的GPS定位相比,定位精度能达到厘米等级,也就是当无人机贴近叶片表面巡检时可达到厘米级别的精度,非常适用于无人机近距离巡检风机叶片表面使其拍摄到的照片更加清晰,同时搭载避障模块,不依赖飞手的操控技术即可有效的躲避障碍物,在飞行环境中更安全、高效的执行巡检任务。
蝙蝠存活率受惠于无人机新技术
最近有一项研究解决风力涡轮机对空中生物(尤其是蝙蝠)造成伤害的问题。根据特拉维夫大学(Tel Aviv University) 和海法大学(Haifa University)的研究人员的说法,世界各地的风力涡轮机每年杀死数百万只飞入叶片的蝙蝠和其他飞行鸟类或动物。解决方案是一种保护蝙蝠免受风力涡轮机伤害的无人机安装技术,利用可传输超声波信号和光的组合阻止了蝙蝠,迫使它们在更高的高度飞行,让涡轮机继续运行。当然,风力涡轮机是可再生能源的极好来源,但它们的运行方法留下了无数的生物学挑战。以前,阻止蝙蝠死亡的唯一方法是在涡轮机活动时停止涡轮机活动,这显然会降低涡轮机的效率。无人机处于不断运动状态,并传输视觉和听觉信号的组合,旨在警告蝙蝠危险。诀窍在于,当信号是静止和恒定的时,动物往往会忽略它们。这项研究是在以色列山谷的蝙蝠温床上进行的。该团队在100米的高度操作无人机,这是平均风力涡轮机中心的高度,并沿着约1米的路径来回操作。雷达和LiDAR设备用于跟踪蝙蝠的活动,并且使用放置在三个不同高度的接收器侦测飞行中蝙蝠的声学记录。这项研究是世界上第一个将雷达、光达和高空声学记录仪等技术结合起来跟踪蝙蝠的研究。然后,研究人员将蝙蝠的正常活动与它们在无人机存在下的活动进行了比较,结果表明该设备达到了其目的:无人机的存在使蝙蝠在大约40米的距离内将蝙蝠的活动减少了约25%。它们的活动几乎都集中到无人机100米以上的高度,甚至高达800米。结果表明该装置可以有效地将蝙蝠从环境中驱赶出去,这些生物可以感知无人机装置上所发射的声音或光且会想办法避开,蝙蝠的存活率肯定会从这项新技术中受益。[9]
备注:
-
Mahmood Shafiee, Zeyu Zhou, Luyao Mei, Fateme Dinmohammadi, Jackson Karama and David Flynn. Unmanned Aerial Drones for Inspection of Offshore Wind Turbines: A Mission-Critical Failure Analysis. Robotics. 2021. Page 3. https://doi.org/10.3390/robotics10010026
-
JP2017-020410A(特開2017-020410),風力発電設備のメンテナンス方法および無人飛行機,NTN株式会社。專利公開日2017年1月26日;JP2022-108420A(特開2022-108420),風力発電設備の点検方法,関西電力株式会社,專利公開日2022年7月26日。
-
KR102142540B1, inspection method for damage of composite blades for wind turbine using machine learning and drone, Industry-Academic Cooperation Foundation Kunsan National University, patent issued on 2020 August 3.
-
CN112360699A,一种全自动风力发电机组叶片智慧巡视及诊断分析方法,华能大理风力发电有限公司,专利公开日2021年2月12日。
-
CN113359815A,基于RTK定位的风机叶片无人机自主避障巡检方法及系统,上海电机学院,专利公开日2021年9月7日。
-
实时动态定位技术(Real Time Kinematic,简称RTK)是实时动态载波相位差分技术的简称,是一种透过基准站和流动站的同步观测,利用载波相位观测值实现快速高精度定位功能的差分测量技术。RTK系统由1个基准站、若干个流动站及无线电通讯系统组成。RTK技术的关键在于使用了GPS的载波相位观测量,并利用了参考站和移动站之间观测误差的空间相关性,透过差分的方式除去移动站观测数据中的大部分误差,提供高达厘米级的精度。实时动态技术 - 维基百科,自由的百科全书 (wikipedia.org)
-
GNSS的全称是全球导航卫星系统(Global Navigation Satellite System),它是泛指所有的卫星导航系统,包括全球的、区域的和增强的,如美国的GPS、俄罗斯的Glonass、欧洲的Galileo、中国的北斗卫星导航系统,以及相关的增强系统,如美国的WAAS(广域增强系统)、欧洲的EGNOS(欧洲静地导航重迭系统)和日本的MSAS(多功能运输卫星增强系统)等,还涵盖在建和以后要建设的其他卫星导航系统。国际GNSS系统是个多系统、多层面、多模式的复杂组合系统。
-
https://en.wikipedia.org/wiki/Real-time_kinematic_positioning#cite_note-Wanninger2008-1
-
https://www.techbriefs.com/component/content/article/tb/stories/blog/47383
好消息~北美智权报有微信公众号了!
《北美智权报》内容涵盖世界各国的知识产权新闻、重要的侵权诉讼案例分析、法规解析,以及产业与技术新知等等。
立即关注北美智权微信公众号→ NAIP_IPServices
~欢迎读者分享与转发~ |
 |
|
【本文只反映专家作者意见,不代表本报立场。】
 |
|
| 作者: |
芮嘉玮 |
| 现任: |
台湾中技社能源暨产业研究中心组长 |
| 学历: |
台湾清华大学 奈米工程与微系统研究所 博士
台湾中原大学 财经法律研究所 硕士
台湾科技大学 材料科学与工程研究所 硕士 |
| 经历: |
台湾工研院技术移转与法律中心执行长室
台湾工研院电子与光电研究所专利副主委
光电产业知识产权经理 |
| 专长: |
长期从事产业研究、专利知识产权与投资评估等工作,专注于能源、产业、环境、经济等议题。擅长创新技术策略分析、科技预测及评估、专利分析与布局、产业分析、知识产权管理与经营策略、专利的商业化与货币化。熟捻产业技术发展趋势,并常在各媒体平台发表文章、应邀演讲,成功引领技术前瞻与产业关键议题。 |
|
|
|